前章までで求めた深層学習モデルを用いると、
アンテナの特性(遠方界、近傍界、入力インピーダンス)を高速に精度よく推定することができます。
ここでは、深層学習モデルでアンテナ特性を求めることを「推論」(inference)、
モーメント法またはFDTD法でシミュレーションすることを「計算」と呼びます。
推論に要する時間は約4msec(NVIDIA RTX 4060)であり、
表2-2のモーメント法の計算の数分の1、表2-4のFDTD法の計算の100分の1です。
したがって、推論を用いることによりアンテナの最適設計を短時間で効率よく行うことができます。
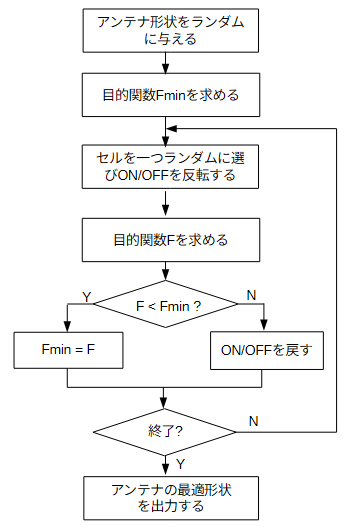
ここでは、図5-1に示す最適化アルゴリズムを用います。
アンテナ形状をランダムに変形して良くなれば採用するという単純なアルゴリズムです。
アンテナの特性を表す数値を「目的関数」または「評価値」と呼び、
その値が小さいほうが良いものとします。
さらに、初期配置をランダムに変えて多数回の反復計算を行い、
その中から最も特性のよいものを最終的な最適形状とします。
ここでは、この繰り返し回数を「繰り返し回数」、
図5-1の繰り返し回数を「反復回数」と呼びます。
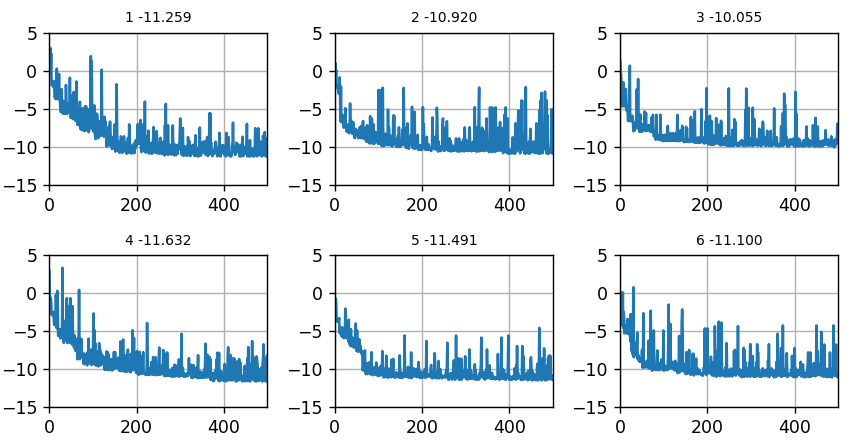
図5-2に目的関数の履歴の例を示します。一つの図が図5-1の反復計算を表します。
横軸は反復回数、縦軸は目的関数です。
上の数字は、繰り返し回と目的関数の最小値です。
一般的に数百回の反復回数で徐々に目的関数が小さくなり一定値に収束します。
推論によって最適化した目的関数はある程度の誤差を伴います。
そこで最後に「計算」によって目的関数を精度よく確定させたのち、
最適なアンテナ形状を選択することが有効です。
言い換えると、「推論」によって短時間で有望な候補を探し、
「計算」によって最終的に最もよいものを選択するということになります。
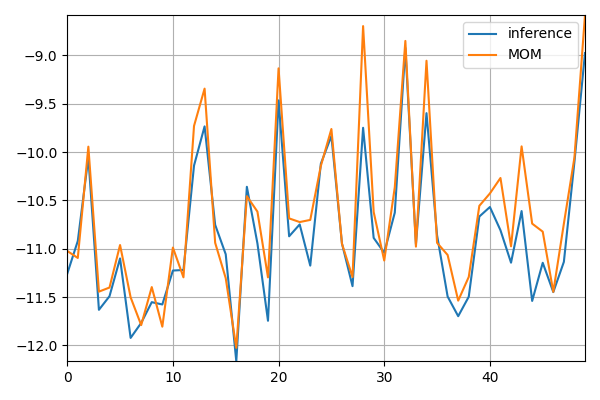
図5-3に推論の最適値と計算の結果を比較した図を示します。
横軸は繰り返し回数であり、青線は推論の最適な目的関数値、
赤線はそのアンテナの計算による目的関数です。
両者にはモデル学習で述べた程度の誤差があります。
なお、モデルの精度が十分良ければ、追加の「計算」は必ずしも必要ではありません。
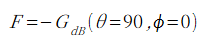
式(5-1)の目的関数により、遠方界の+X方向(θ=90度、φ=0度)の利得を最大にします。
目的関数は小さい方がよいので負号をつけます。
また、利得はdB(=10*log10(電力))に変換しています。
最適アンテナのXY面の遠方界パターンを図5-4に示します。利得は12.7dBです。
 (5-1)
(5-1)
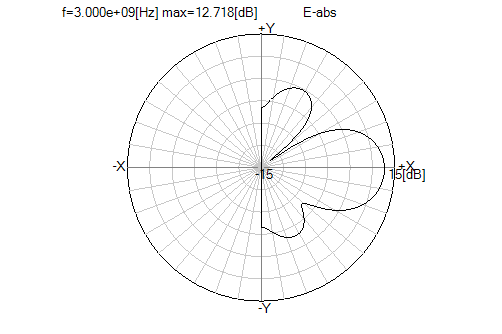
式(5-2)により、入力インピーダンスが100Ωに近く、遠方界利得が最大となるアンテナを探します。
重みは利得と整合を重視する度合を表します。
XY面の遠方界パターンを図5-5に示します。
利得は11.0dB、入力インピーダンスはZin=106-14jΩです。
 (5-2)
(5-2)
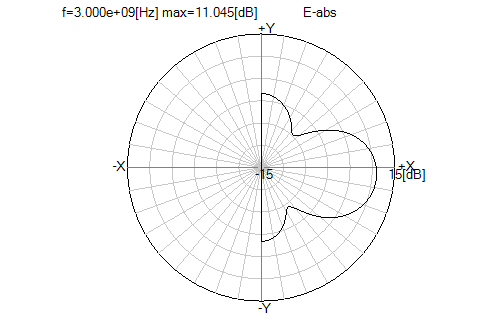
式(5-3)により、遠方界XZ面内のθ=60度で垂直偏波、θ=120度で水平偏波とします。
それぞれ第2項により交差偏波を小さくしています。
本ケースでは遠方界をdBではなく電界次元としています。
XZ面の遠方界パターンを図5-6に示します。
利得は60度で8.9dB、120度で9.0dBです。
 (5-3)
(5-3)
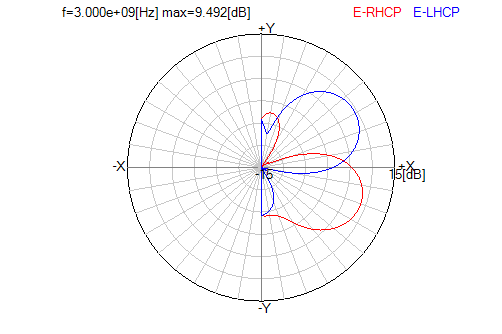
式(5-4)により、遠方界XY面内のφ=-30度で右旋円偏波、φ=30度で左旋円偏波とします。
それぞれ第2項により交差偏波を小さくしています。
XY面の遠方界パターンを図5-7に示します。
利得は-30度で8.2dB、30度で9.4dBです。
 (5-4)
(5-4)
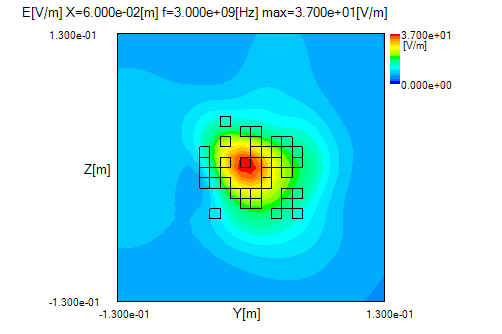
式(5-5)により、近傍界の1点の電界を最大にします。
X=60mm面が学習した近傍面なのでその上の点のみが対象となります。
図5-8より指定した点(中心)の電界が大きくなっていることがわかります。
 (5-5)
(5-5)
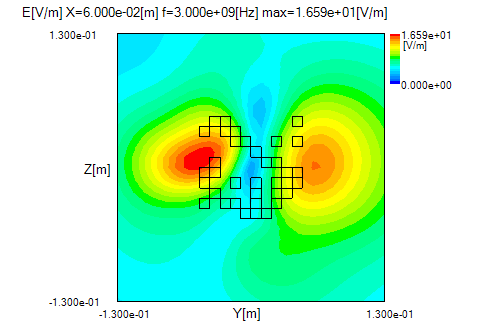
式(5-6)により、近傍界の2点(60,-60,0),(60,60,0)の電界を最大にし、
1点(60,0,0)の電界を最小にします。
図5-9より電界が目的通りになっていることがわかります。
 (5-6)
(5-6)
複数の周波数のデータで学習したモデルを使用すると、
複数の周波数でのアンテナ特性を最適化することができます。
式(5-7)により、二つの周波数での遠方界利得を最大にします。
図5-10(a)(b)より二つの周波数で遠方界利得が高くなっています。
図5-10(c)より矢印で示す設計周波数を含む帯域で遠方界利得が10dB以上であることがわかります。
 (5-7)
(5-7)
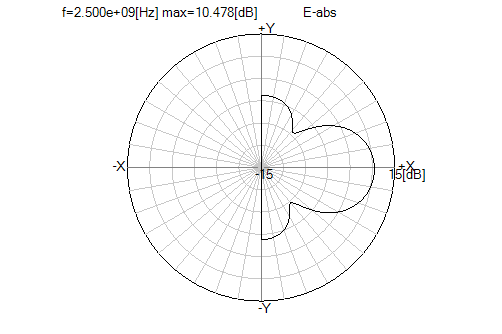
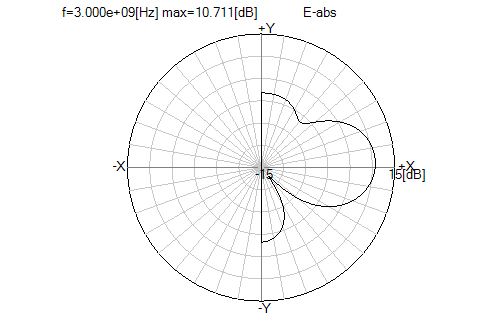
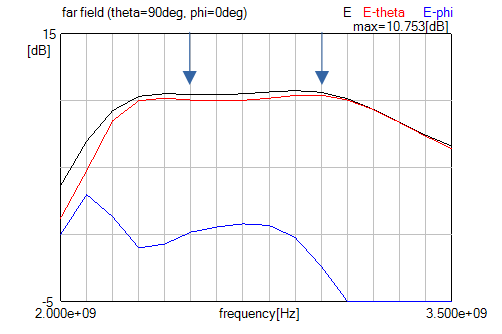
図5-10 遠方界, 2周波数
FDTD法についても、使い方と計算時間はモーメント法とまったく同じです。
最適設計の性能は学習したモデルの性能で決まります。
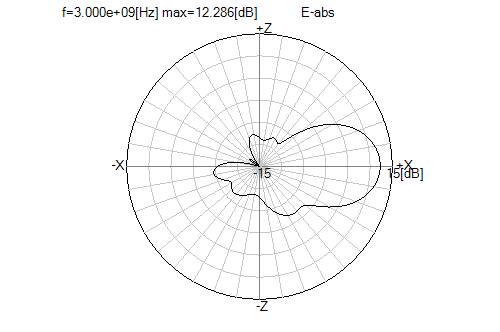
式(5-8)により、遠方界の+X方向(θ=90度、φ=0度)の利得を最大にします。
図5-11は遠方界XZ面パターンであり、利得は12.3dBです。
 (5-8)
(5-8)